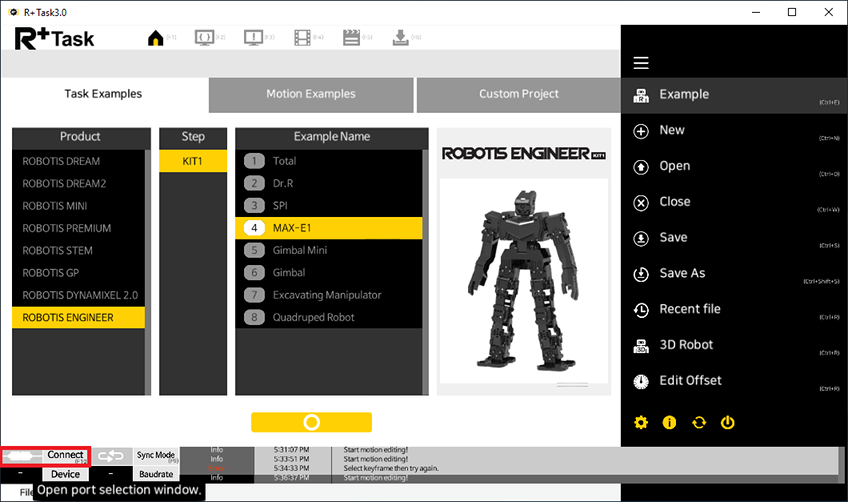
MODE 버튼 부분을 BT-410 동글에 가까이 가져가면, 페어링이 완료됩니다.R+ Task 3.0을 실행시킨 후, 왼쪽 하단의 연결버튼을 클릭 해주세요.
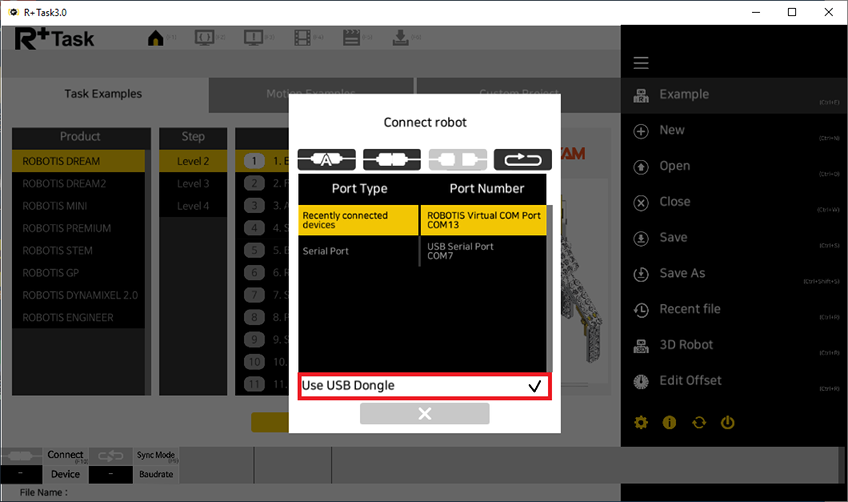
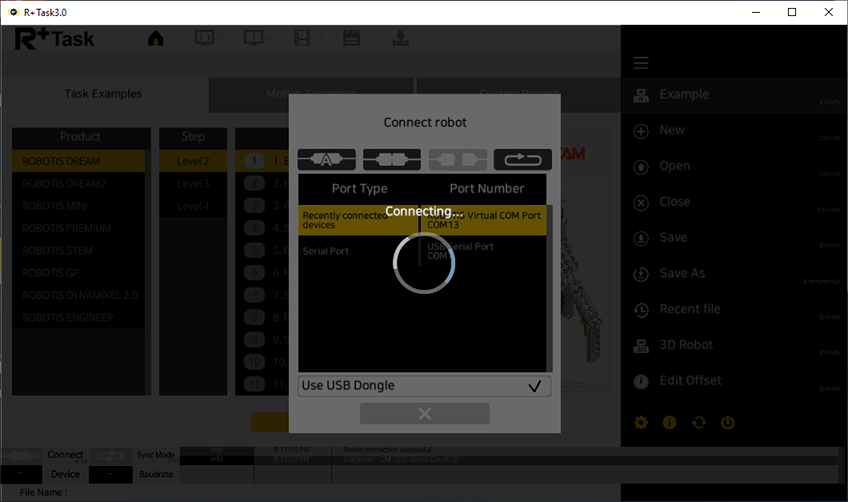
BT-410 동글을 사용할 경우 반드시 Use USB Dongle 옵션을 선택해주세요.
사용할 시리얼 포트를 선택해 주세요.
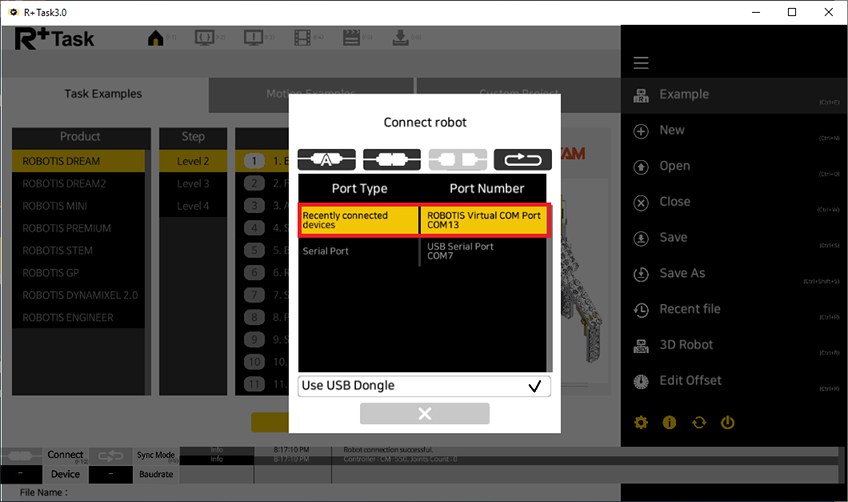
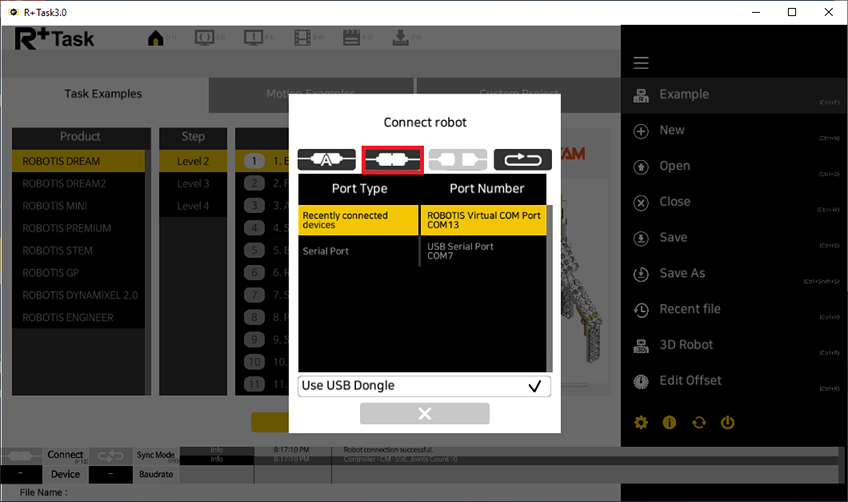
연결 버튼을 클릭하여, PC와 제어기를 연결시켜 주세요.
연결이 성공적으로 완료되면 ‘삐비빅’ 소리가 납니다.
MODE 버튼 부분을 BT-410 동글에 가까이 가져가면, 페어링이 완료됩니다.R+ Task 3.0을 실행시킨 후, 왼쪽 하단의 연결버튼을 클릭 해주세요.
BT-410 동글을 사용할 경우 반드시 Use USB Dongle 옵션을 선택해주세요.
사용할 시리얼 포트를 선택해 주세요.
연결 버튼을 클릭하여, PC와 제어기를 연결시켜 주세요.
연결이 성공적으로 완료되면 ‘삐비빅’ 소리가 납니다.
참고 :
- 첫 페어링시 제어기의 MODE 버튼쪽으로 BT-410 동글을 가까이 가져가면 자동으로 페어링됩니다.
- 페어링이 완료된 후에는 블루투스의 통신거리 이내에서 로봇과 PC가 멀어져도 연결이 유지됩니다.
- 페어링이 한번 설정되면, 재시작할 때 블루투스의 통신거리 이내에서 자동으로 페어링이 됩니다.